電池で動く永久カレンダー付きの時計
ポイント- 市販のクォーツムーブメントの弱い力で動くカレンダー付きの掛け時計
- うるう年を含むすべての月の長さを正しく処理する永久カレンダー(パーペチュアルカレンダー)機構
- 月・日・曜日と24時間表示がバランスよく配置され、すべての針が時計回り
- 仕組みがよく分かるスケルトン構造で、表側にネジが見えないデザイン
- マルチマテリアル3Dプリンタを利用して美しく、前面・背面ともフラットに
コンセプト
以前、クォーツムーブメントの弱い力でもちゃんと動作する、永久カレンダー(パーペチュアルカレンダー)を備えた掛け時計を作成した。電源を配線することなく長期間、精度よく動き、実用性も高いものになった。だが、3Dプリンタゆえの外観の粗さがあったことや、一部の歯車が前面に露出している点などが気になっていた。そこで今回、マルチマテリアル3Dプリンタを用いるとともに、内部のフレームと前面パネルを2階建てにして、外観の一新を図った。時計の針には、ムーブメントを購入したときに付属しているものを利用することが出来るようにもなり、機能・外観ともに文句のつけようがない時計になったと思う。
設計

外観上の改良点を上の写真に示した。この時計は、時針の回転を動力として取り出し、これによりカレンダーを自動的に進めていく。そのため、時針に歯車を取り付け、この動きを歯車で下方へ導いていたのだが、この歯車を前面パネルの裏側に移すことで時計の中央付近がすっきりし、違和感のないものになった。同時に、時針・分針・秒針が前面パネルに近づき、時間が読み取りやすくなった。歯車と時針が分離したことで、時計に付属している針をそのまま利用できるようにもなった。
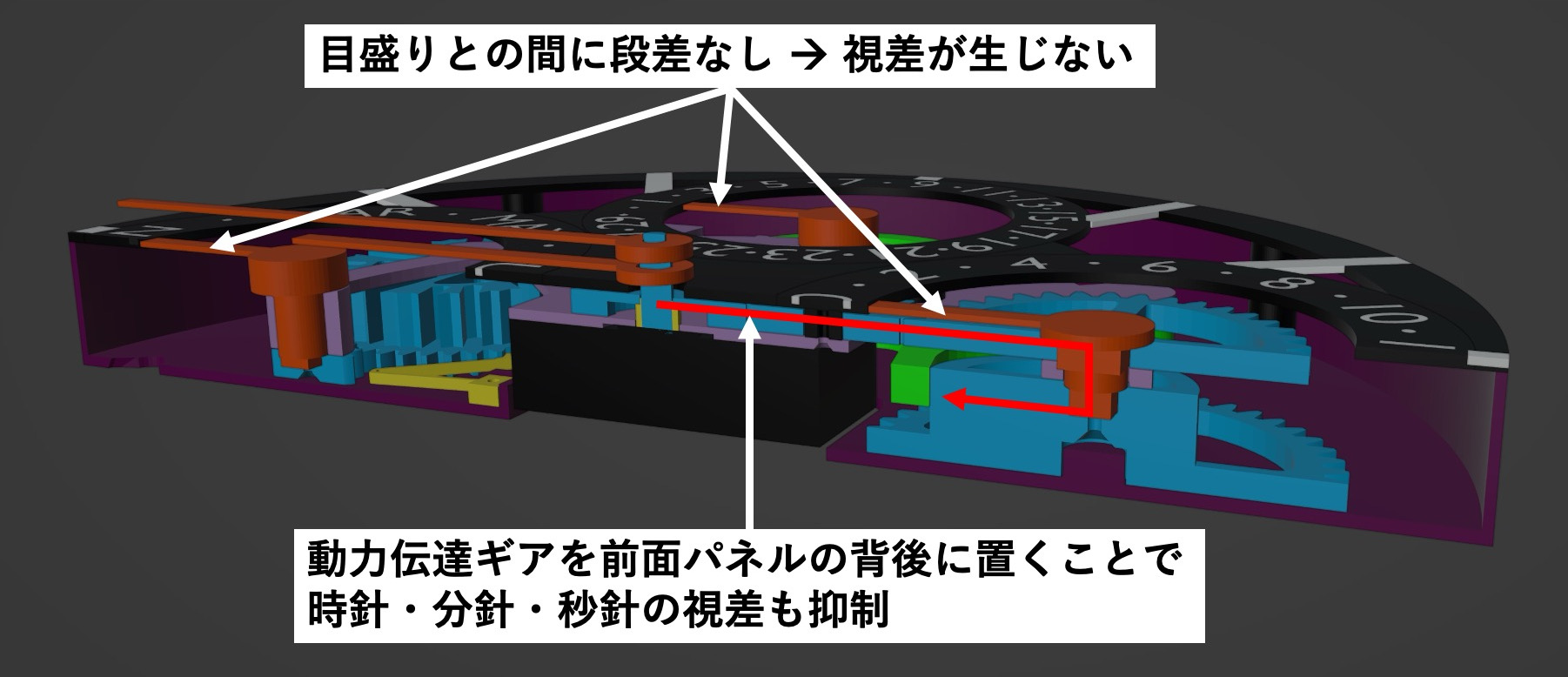
歯車を内部に埋め込む関係で、前回の時計は前面パネルと背面パネルだけからなる構造だったところ、今回の時計では前面パネル・内部フレーム・背面パネルの三層構造になった。これによりカレンダーの4つの針の高さが前面パネルとツライチになり、時計を斜めから見ても、周囲の目盛りとのズレが生じないというメリットも生まれた。また、中央の時針に取り付けた歯車が脱落するおそれがなくなり、歯車を取り付ける硬さの調整が不要になった(前回の設計では、取り付けがゆるすぎると時針が脱落する可能性があったため、時針の軸の加工により、ちょうどいい硬さで歯車が固定されるよう調整する必要があった)。
ここ数年で、フィラメントを自動で切り替えながらプリントできるマルチマテリアルタイプの3Dプリンタが増えてきた。特に今回利用した Bambu Lab のプリンタは安定な切り替えが可能で、プリント品質も極めて高い。ビルドプレートにランダムなテクスチャがあり、これがプリントの筋をうまく隠してくれることもあって、ビルドプレート密着面を表側にすると美しい外観が得られやすい。そこで、文字を凹凸でなく、色違いのフィラメントを埋め込むことで表現するデザインに変更した。プリント速度も速く、この時計の全モデルの出力には12時間少々しか要しない。
組み立て
組み立てガイド動画
今回も、組み立て方の動画を作成した。データももちろん公開しており、できるだけたくさんの人に作って楽しんで欲しいと考えているからである。今回もやはりリクエストがあったため、非英語圏向けの前面パネルも前回同様に用意した。部品点数はわずか24と少なく、すべての部品はサポートなしで印刷できるため、「複雑時計」と言われる機構の割には組み立ても簡単である。
たったこれだけの部品で、月・日・曜日に加え24時間表示まででき、2100年まで無修正で正しい日付が表示されるとは、ちょっと拍子抜けに思われるかもしれない。からくり・ものづくり界隈では、複雑なものほどウケる傾向があるように思われ、また、かなり調整を行わないと動かなさそうな、つまり、他人には再現できそうにないものも多く見られる。そういう中で、3Dプリンタの特性を活かし、できるだけ1つの部品に多数の機能を盛り込みつつ、プリントのコツや調整が不要な構造にするのが私の設計のこだわりである。
前の時計から引き継いだ美点だが、
- 月・日・曜日・24時間表示の4つのサブダイヤルが3・6・9・12時の位置にバランスよく配置されていること
- すべての針が当然ながら時計回りに進むこと
- 分解することなく、簡単にカレンダーの修正ができること
- 適度に内部機構を見せるスケルトン構造でありつつ、ノイジー過ぎないこと
- 前面にはネジの頭が露出しないこと
なお、前バージョンにも、今回盛り込んだ改良点のうち適用できる部分はバックポーティングした。具体的には、マルチマテリアルプリンタを用いた美しい前面パネル、カレンダー針の停止位置の高精度化などである。