Hollow Clock 2(空洞時計2)
ポイント- 静かでなめらかな動作
- 歯車を滑り込ませるだけの簡単組み立て
コンセプト
先日作成した「空洞時計」,Hollow Clockはとてもうまく設計できた.見た目もスッキリで部品点数も少なく,かつ作りやすい.しかし,動きが間欠的で,ガタガタと揺れる動きがカワイイという人がいる一方で,なめらかに動かないの?という意見もあった.また,音が結構するので寝室には置けない.なめらかに動かすのは簡単で,それなりのモーターと歯車があればできるのは分かっているのだけれども・・と思いつつも,需要があるなら作ってしまえということで作ってみた.

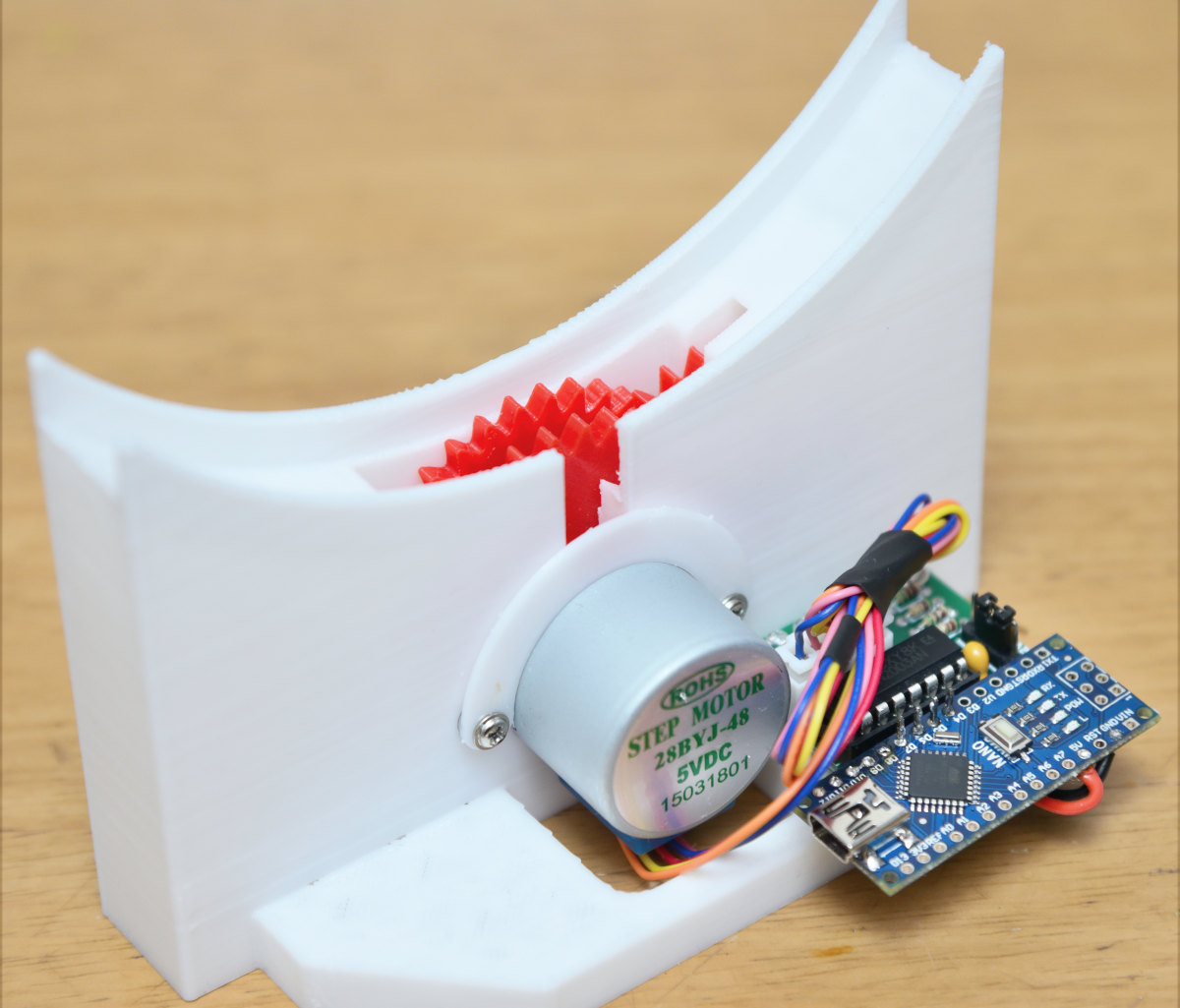
回転角度(回転速度)を合わせないと時計にはならないので,今回はステッピングモーターを用いる.ステッピングモーターは普通のモーターよりも少し高いし,制御回路も複雑なのだが,そこはよく出来たもので,自作用に安価なステッピングモーター (28BYJ-48 5V)が駆動回路付きで売られている.そのお値段,なんと1個あたりたったの233円で,これは実のところ最廉価クラスのラジコン用サーボと変わらない値段だ.ただ,配線が少し多くてラジコン用サーボに比べると少し面倒なこともあって,買ったままストック(放置)していたので,今回使ってみることにした.

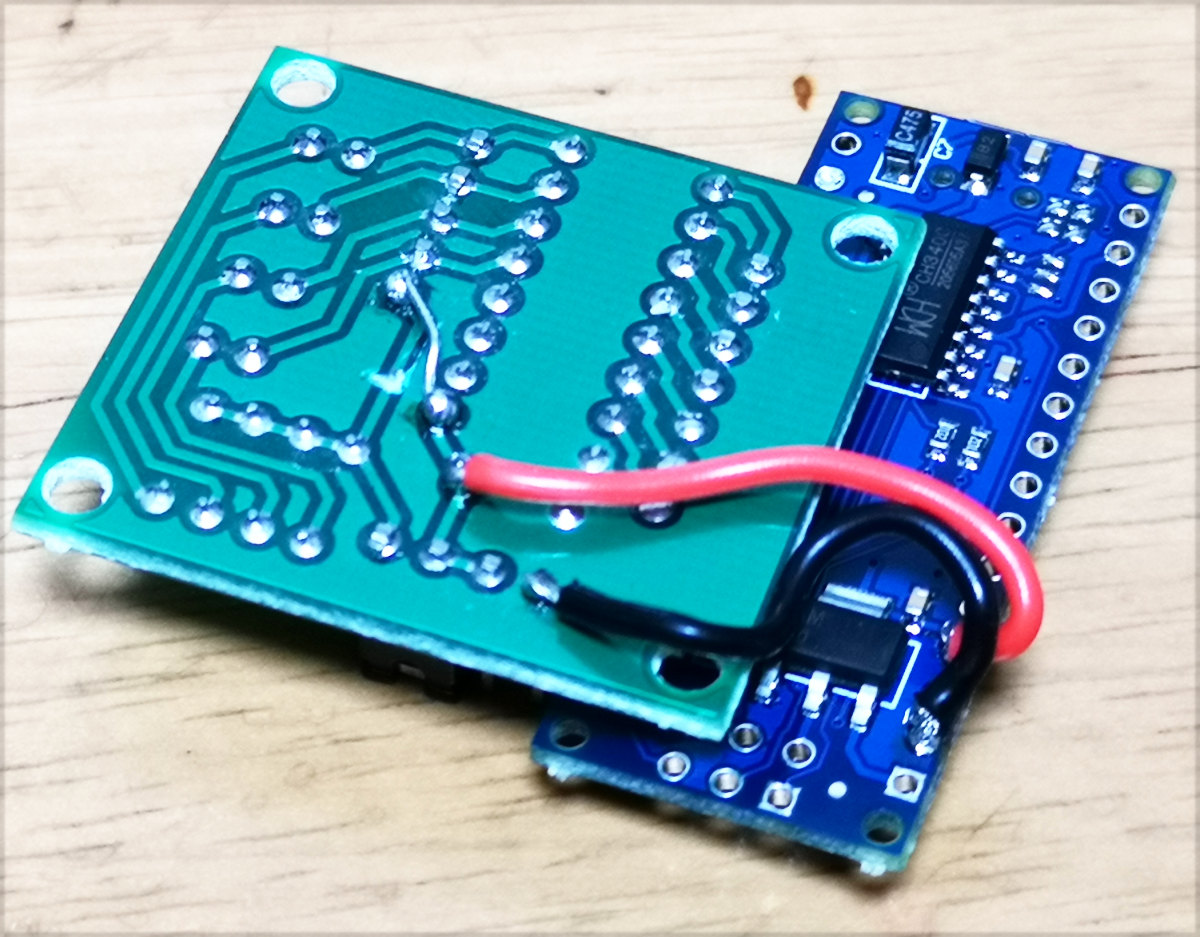
前回の製作で micro:bit に加えて Arduino を使用したことでハードルが少し下がったということもある.というのは micro:bit はたくさんの信号線を取り出すのが少し面倒だが,それに比べて Arduino nano ならモータードライバー基板と直結できるのだ.上の写真のようにドライバ基板(アンプ基板)のピンヘッダを直結すればいい.場所も,この写真では D4〜D7 に接続しているが,他の位置でも使用できる.前回同様,USB由来の5Vがそのまま取り出せるのも便利である.動作確認用のLEDがピカピカと眩しいので裏面のパターンをカットして,ジャンパピンの有無でLEDのON/OFFを切り替えられるようにもした.
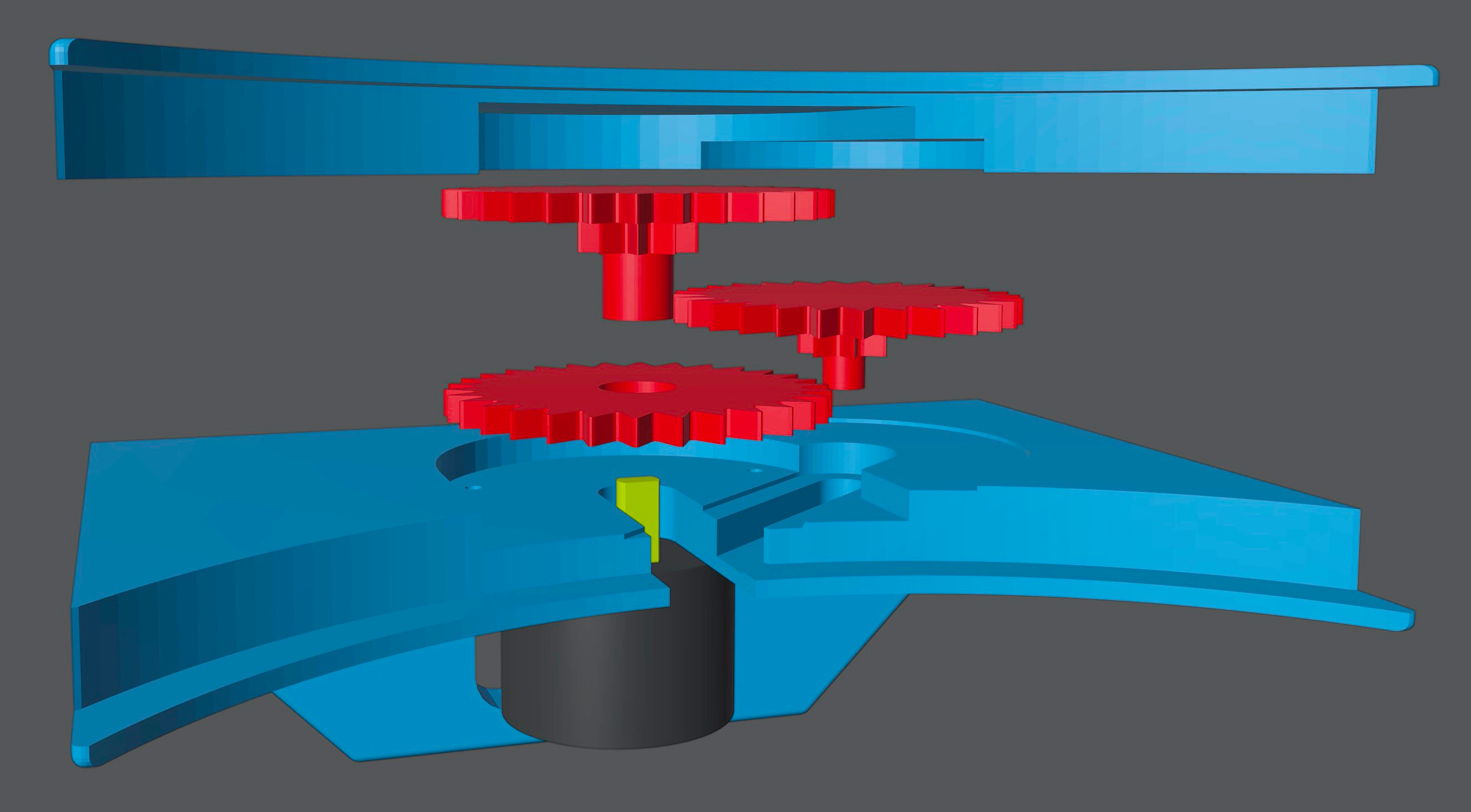
自分のポリシーとして,デザインにどこかしら(大げさだが)「なるほど,この手があったか!」と思わせる仕組みを1つは盛り込むようにしている.前回の Hollow Clock では,角度のずれた2本の爪と,サーボの回転角度の組み合わせで,分針だけを動かすことも,分針と時針の両方を動かすこともできるような構造にしてあり,これでサーボ1つで問題を片付けている.今回は正攻法に,歯車で分針の回転を 1/12 に減速するのがよいのだが,それだけでは当たり前すぎる.そこで今回は歯車のセット方法に工夫を施した.上の図のように減速ギアは溝に沿って滑り込ませるだけでセット完了で,あとは,分針と時針(の円盤)を駆動する歯車も上から差し込めば良い構造である.分針駆動ギア(一番上)はサーボの軸で保持される.時針駆動ギアは中心に穴があり,分針駆動ギアの軸に支えられる.右の減速ギアは溝で保持されるという具合である.さらに全ての部品はサポートなしにプリントできるようにもした.
組み立て手順も冒頭の動画の後半で解説している.前回の Hollow Clock よりも部品は数個増えたが,プリントもより簡単になり,また,円盤同士の隙間もなくなった.全体に少し小ぶりにもなったが,惜しむらくは台座部分の高さが少し高くなった点だろうか.中央の歯車が大きいので,モーターを上下逆につけても5mmほどしか高さを低く出来ない.これ以上歯車を小さくすると,(歯車の歯数はこれ以上減らしたくないので)歯車が細かくなり,3Dプリンタの造形精度からして安定動作が難しくなってしまう.
例によって3DデータとプログラムはThingiverseで公開している.